Talk:Cheesoid: Difference between revisions
Jump to navigation
Jump to search
No edit summary |
No edit summary |
||
| Line 187: | Line 187: | ||
* motor enable dig out | * motor enable dig out | ||
* PWM x4 for motor logic control - can it be reduced? | * PWM x4 for motor logic control - can it be reduced? | ||
* bumper and cliff inputs - use serial mux? | |||
* others! | |||
PIN usage summary table... | PIN usage summary table... | ||
TODO | |||
=== goal/job list === | |||
Take to HS: | |||
* boxfile, eeepc, station clock antenna, wheel assemblies, | |||
* big battery station? nah, | |||
* backup multimeter and hook probes - label it and solder plugs onto probe wires | |||
DO: - | |||
* camp in blue room with all gear | |||
* fabricate chassis | |||
** 40mm al angle motor mounts | |||
** al cross support plates | |||
** wheel assemblies | |||
* pizza box mods | |||
** power port extension | |||
** USB extension - USB hub | |||
** PWR switch extension - LED in "Micro", PWR switch? Monostable/bistable startup flasher circuit for "Micro" switch | |||
* cylinder case mods | |||
** speakers in mouth plate/grill | |||
** side mount for Xino and boards | |||
** top for beacon - keep on side for now | |||
** mounting of cylinder on pizza box | |||
* Xino/UNO main sketch code | |||
** motor drive code and motor drive commands from PC | |||
** speech commands from | |||
* PC app code | |||
** console read and process | |||
** speech module | |||
*** speech commands from stdin | |||
*** speech thread - busy flag and job queue management | |||
** motor module | |||
*** motor control input from STDIN | |||
** sensor module | |||
** camera module - look at Java interaction with V4L or whatever is in use | |||
** mic input - and speech recognition | |||
** GUI interface port and GUI app | |||
--[[User:Msemtd|Michael Erskine]] 11:38, 28 September 2011 (EST) | |||
Revision as of 16:38, 28 September 2011
- interact with the fridge for cheese status
- interact with the petrol pump for petrol status
- it needs to know where they are to go and talk to them
- the status needs to be stored and needs to be set - Xino at each?
- it need to be able to read the status from the fridge and the petrol pump - what sort of interface? IR remote control?
Petrol status
- just a number!
Cheese status
- many cheese types - each with use by date
- Primula status is "in tube"
Motor skills
- get motors from post office - DONE
- simple test circuits with 12V battery and driver ICs
- Texas Instruments L293NE or Texas Instruments SN754410 (almost equivalent)
- useful searches L293NE or SN754410 PWM arduino
- http://itp.nyu.edu/physcomp/Labs/DCMotorControl
- http://www.ti.com/product/sn754410
- datasheet: http://www.sparkfun.com/datasheets/IC/SN754410.pdf
- PWM for speed control - a two motor library perhaps with feedback loop via rotary encoder?
- using PWM on 2 motors http://letsmakerobots.com/node/2074
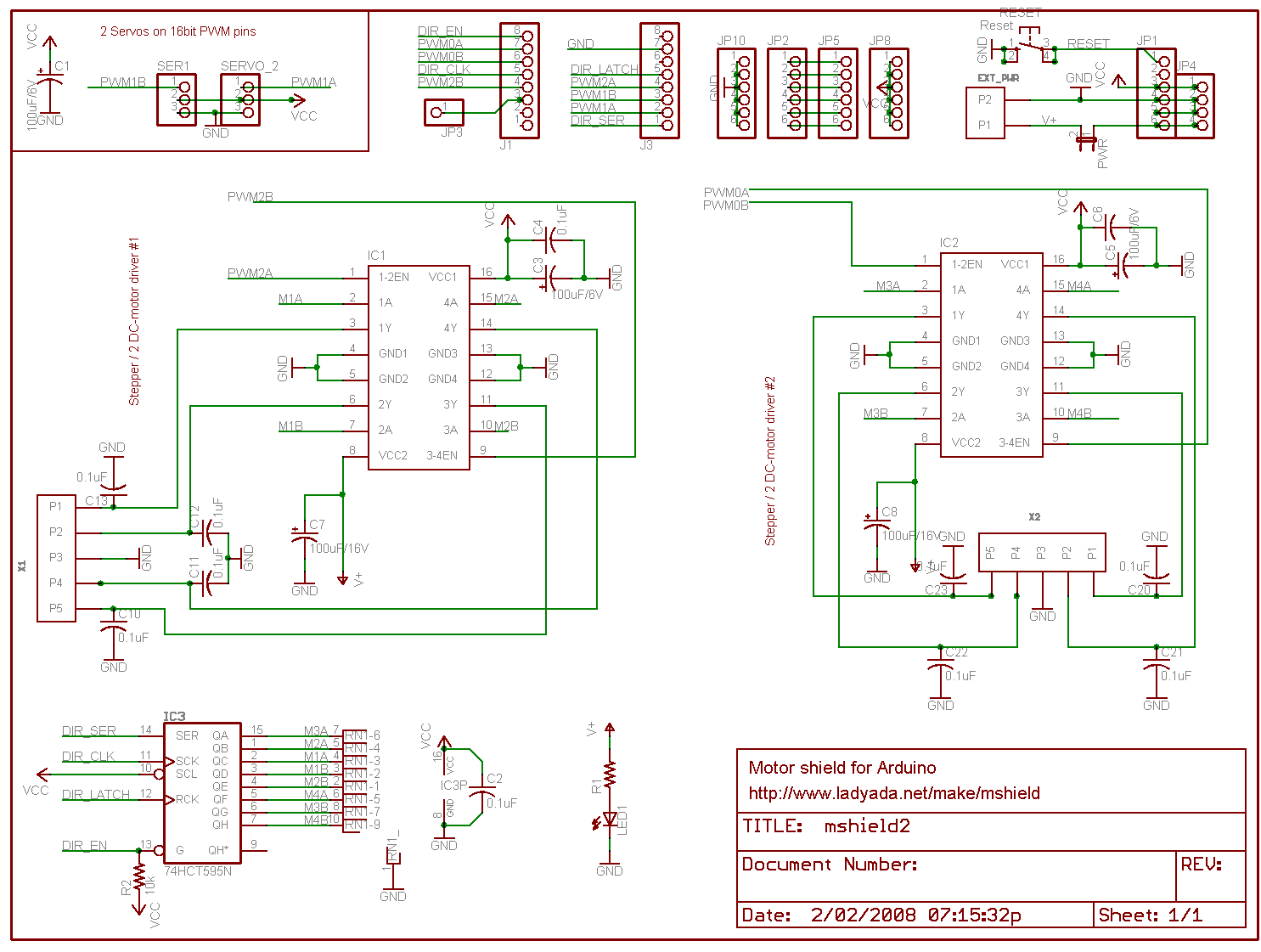
- Adafruit motor shield is a good example:
- http://www.adafruit.com/products/81
- http://www.ladyada.net/images/mshield/mshieldv1-schem.png
- My own custom motor shield for 2 DC motors
- mounting the motors and designing the axle couplings
- building the wheels : nearly done - some tweaking and securing to do
- building the plastic chassis - what's that display board plastic material called?
- milling the plastic
- strong enough to carry those batteries? !!!!
- aluminium cross bracing?
- battery mount - where?
- perhaps move to 2x 6V - keep it flexible
- battery regulation: http://letsmakerobots.com/node/3880
{kind=link}
OK, motors tested with a two motor circuit...
int motor_left[] = {
2, 3};
int motor_right[] = {
7, 8};
const int ledPin = 13; // LED
const int switchPin = 10; // switch input
const int enablePin = 9; // H-bridge enable pin
// ————————————————————————— Setup
void setup() {
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
pinMode(switchPin, INPUT);
pinMode(enablePin, OUTPUT);
// Setup motors
int i;
for(i = 0; i < 2; i++){
pinMode(motor_left[i], OUTPUT);
pinMode(motor_right[i], OUTPUT);
}
check_enable();
// blink the LED 3 times. This should happen only once.
// if you see the LED blink three times, it means that the module
// reset itself,. probably because the motor caused a brownout
// or a short.
blink(ledPin, 3, 100);
}
void check_enable(){
digitalWrite(enablePin, digitalRead(switchPin));
}
// ————————————————————————— Loop
void loop() {
drive_forward();
delay(1000);
motor_stop();
Serial.println("1");
drive_backward();
delay(1000);
motor_stop();
Serial.println("2");
turn_left();
delay(1000);
motor_stop();
Serial.println("3");
turn_right();
delay(1000);
motor_stop();
Serial.println("4");
motor_stop();
delay(1000);
motor_stop();
Serial.println("5");
}
// ————————————————————————— Drive
void motor_stop(){
check_enable();
digitalWrite(motor_left[0], LOW);
digitalWrite(motor_left[1], LOW);
digitalWrite(motor_right[0], LOW);
digitalWrite(motor_right[1], LOW);
delay(25);
}
void drive_forward(){
check_enable();
digitalWrite(motor_left[0], HIGH);
digitalWrite(motor_left[1], LOW);
digitalWrite(motor_right[0], HIGH);
digitalWrite(motor_right[1], LOW);
}
void drive_backward(){
check_enable();
digitalWrite(motor_left[0], LOW);
digitalWrite(motor_left[1], HIGH);
digitalWrite(motor_right[0], LOW);
digitalWrite(motor_right[1], HIGH);
}
void turn_left(){
check_enable();
digitalWrite(motor_left[0], LOW);
digitalWrite(motor_left[1], HIGH);
digitalWrite(motor_right[0], HIGH);
digitalWrite(motor_right[1], LOW);
}
void turn_right(){
check_enable();
digitalWrite(motor_left[0], HIGH);
digitalWrite(motor_left[1], LOW);
digitalWrite(motor_right[0], LOW);
digitalWrite(motor_right[1], HIGH);
}
/*
blinks an LED
*/
void blink(int whatPin, int howManyTimes, int milliSecs) {
int i = 0;
for ( i = 0; i < howManyTimes; i++) {
digitalWrite(whatPin, HIGH);
delay(milliSecs/2);
digitalWrite(whatPin, LOW);
delay(milliSecs/2);
}
}
This sketch is a munge of http://letsmakerobots.com/node/2074 and http://itp.nyu.edu/physcomp/Labs/DCMotorControl
I want to have motor enable based on digital logic as this will be controlled by bumper and cliff sensors
Range Sensors
- SRF05 by Devantech Ltd
Xino upgrades
- power screw terminal blocks: http://uk.rs-online.com/web/p/products/4258720/
- smt caps for smt regulators!
PIN usage on main Xino
- PWM capable pins: 3,5,6,9,10,11
- Dig out x2 for eyes
- Dig in for mode switch
- dig out for beacon on pin 13
- motor enable dig out
- PWM x4 for motor logic control - can it be reduced?
- bumper and cliff inputs - use serial mux?
- others!
PIN usage summary table...
TODO
goal/job list
Take to HS:
- boxfile, eeepc, station clock antenna, wheel assemblies,
- big battery station? nah,
- backup multimeter and hook probes - label it and solder plugs onto probe wires
DO: -
- camp in blue room with all gear
- fabricate chassis
- 40mm al angle motor mounts
- al cross support plates
- wheel assemblies
- pizza box mods
- power port extension
- USB extension - USB hub
- PWR switch extension - LED in "Micro", PWR switch? Monostable/bistable startup flasher circuit for "Micro" switch
- cylinder case mods
- speakers in mouth plate/grill
- side mount for Xino and boards
- top for beacon - keep on side for now
- mounting of cylinder on pizza box
- Xino/UNO main sketch code
- motor drive code and motor drive commands from PC
- speech commands from
- PC app code
- console read and process
- speech module
- speech commands from stdin
- speech thread - busy flag and job queue management
- motor module
- motor control input from STDIN
- sensor module
- camera module - look at Java interaction with V4L or whatever is in use
- mic input - and speech recognition
- GUI interface port and GUI app
--Michael Erskine 11:38, 28 September 2011 (EST)