TiLDA Balance: Difference between revisions
Jump to navigation
Jump to search
mNo edit summary |
m Danspencer101 moved page Project:TiLDA Balance to TiLDA Balance over redirect |
||
| (5 intermediate revisions by 3 users not shown) | |||
| Line 58: | Line 58: | ||
* basic PID (proportional-integral-derivative) controller - see http://en.wikipedia.org/wiki/PID_controller | * basic PID (proportional-integral-derivative) controller - see http://en.wikipedia.org/wiki/PID_controller | ||
* existing instructable using MPU6050: http://www.instructables.com/id/Balancing-Instructable-Robot/ | |||
* how is the MPU connected: See schematic [[File:TiLDA_Mk2_Prototype_v0.333.pdf]] | |||
== Stretch Goals == | == Stretch Goals == | ||
| Line 63: | Line 67: | ||
* Total Segway domination - human or multi-human carrying! | * Total Segway domination - human or multi-human carrying! | ||
* wheel-less eerie ball/egg | * wheel-less eerie ball/egg | ||
[[Category:Projects]] | |||
Latest revision as of 11:59, 5 February 2019
First entry of https://wiki.emfcamp.org/wiki/Badge_Creations !!!
I'm working on making use of the TiLDA with its MPU-6050 as the brains of a balancing platform (initially a little balance-bot but eventually a ridable Segway-like platform if all goes well). The MPU-6050 has a 3-axis gyroscope, 3-axis accelerometer, and a Digital Motion Processor(TM) (DMP) integrated into a tiny little package on the back of the badge (IC2). It can do a lot of the grunt work leaving the badge micro plenty of space and time to do the other cool stuff.
--Michael Erskine (talk) 4 September 2014
- The MPU-6050
First bot
I want a quick and cheap entry point for people to achieve first before forking out for expensive parts.
-
 gearmotor, smooth side with m3 bolts
gearmotor, smooth side with m3 bolts -
 gearmotor, side view
gearmotor, side view -
 cheap L298N motor driver board (eBay)
cheap L298N motor driver board (eBay) -
 wheel, gearmotor, driver
wheel, gearmotor, driver -
 wheel mounted on gearmotor
wheel mounted on gearmotor -
 TiLDA
TiLDA






- Getting to grips with development on TiLDA: see EMF wiki for the most part (https://wiki.emfcamp.org/wiki/TiLDA_MKe)
- https://github.com/emfcamp/Mk2-Firmware
- MPU-6050
- MPU = Motion Processing Unit
- compare TiLDA usage with that of Sparkfun breakout schematic at https://cdn.sparkfun.com/datasheets/Sensors/IMU/Triple_Axis_Accelerometer-Gyro_Breakout_-_MPU-6050_v12.pdf
- orientation of the device and mapping to "normal" badge orientation
- libs... TODO
- Cheap little motors: almost ubiquitous little gearmotors with wheels £4.30 from China on eBay
- 2Pcs Smart Car Robot Plastic Tire Wheel with DC Biaxial Gear Motor for Arduino http://cgi.ebay.co.uk/ws/eBayISAPI.dll?ViewItemVersion&item=271534358812&view=all&tid=1348546156017
- Model : HC02-48, Working voltage: 3-6V, Specification: Biaxial, Reduction ratio: 1:48, 3V no load: 125 R/M, 3 V no load with 66 mm wheel: 26 m/min, 5 V no lode: 208 R/M, 5 V nolode with 66 mm wheel: 44 m/min, Torque: 0.8 kg/cm, Speed: fast
- Cheap motor drivers: ubiquitous L298N module
- Battery power: separate power supply from rechargeable AA batteries direct to motor driver.
prototype body
- Laser cut (naturally!) from 3mm ply. Acrylic may be a bit brittle for the crashing that will occur!
- box out the motors as "legs" and form pegs to connect those to a smallish horizontal platform
- the motor driver can dangle below the platform, twixt the legs to "catch the breeze"!
- the TiLDA will be mounted above the platform in a variety of orientations configurable in the software
-
 laser leg development - cutouts for bits
laser leg development - cutouts for bits -
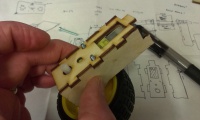 leg 3-sided box
leg 3-sided box -
 wraps around gearmotor body and bolts on
wraps around gearmotor body and bolts on -
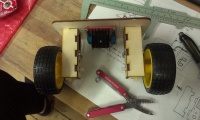 platform designed - dry fit
platform designed - dry fit -
 glue up
glue up -
 with motor driver board
with motor driver board -
 upright
upright







prototype software
- choose how much of the emfcampbadge software to integrate
- e.g. do we want to just add RTOS tasks to the existing badge software?
- the display driver and menu system would be handy
- basic PID (proportional-integral-derivative) controller - see http://en.wikipedia.org/wiki/PID_controller
- existing instructable using MPU6050: http://www.instructables.com/id/Balancing-Instructable-Robot/
- how is the MPU connected: See schematic File:TiLDA Mk2 Prototype v0.333.pdf
Stretch Goals
- Ball balancing: http://youtu.be/dr5xdpLL58A
- Total Segway domination - human or multi-human carrying!
- wheel-less eerie ball/egg